


El MIT y el Instituto AMS crean robots autónomos que podrían usarse como nuevos modos de transporte y ayudar a mejorar el flujo de tránsito en los canales de Ámsterdam.
La ciudad de Ámsterdam visualiza un futuro donde las flotas de barcos autónomos navegan por sus numerosos canales para transportar mercancías y personas, recolectar basura o auto-ensamblarse en plataforma y puentes flotantes.
En este sentido, el Instituto de Tecnología de Massachusetts (MIT) y el Instituto de Ámsterdam para Soluciones Metropolitanas Avanzadas (Instituto AMS) han desarrollado un robot acuático autónomo llamado “Roboat” con el objetivo de crear nuevos modos de transporte y ayudar a mejorar el flujo de tránsito en los canales de la capital holandesa, donde una cuarta parte de la superficie es agua.
Los “Roboat” tienen la capacidad de reconocerse mutuamente y enlazarse. Los científicos quieren construir una flota de estos robots –equipados con sensores, propulsores, microcontroladores, módulos GPS y cámaras– y aseguran que pueden mejorar el transporte y la recolección de basura en Ámsterdam.
Los roboats pueden evitar obstáculos y desvíarse si perciben algo en su camino. Tienen la capacidad de formar estructuras de gran envergadura como puentes peatonales e incluso las bases para un mercado de alimentos, al desmontarse y conectarse de forma totalmente autónoma. Además, los roboats pueden usarse como sensores móviles para recopilar datos sobre la infraestructura de la ciudad y la calidad del aire y el agua, entre otras cosas.
En 2016, los investigadores del MIT probaron un prototipo de “Roboat” que navegaba en los canales de Ámsterdam avanzando hacia adelante, atrás y lateralmente a lo largo de una ruta preprogramada. El año pasado crearon versiones de bajo coste impresas en 3D equipadas con algoritmos avanzados para el seguimiento de la trayectoria.
En un documento presentado en la Conferencia Internacional sobre Robótica y Automatización, los investigadores aseguran que el roboat puede identificar y conectarse a las plataformas de acoplamiento enlazándose automáticamente a un mecanismo de cierre personalizado con una precisión milimétrica. El robot reconoce si ha perdido la conexión y vuelve a intentarlo.
Los científicos probaron la técnica de acoplamiento en una piscina del MIT y en el río Charles, Massachusetts. En ambos casos, las unidades roboat pudieron conectarse con éxito en unos 10 segundos, comenzando desde aproximadamente 1 metro de distancia, o tuvieron éxito después de algunos intentos fallidos. En Ámsterdam, el sistema podría ser especialmente útil para la recolección de basura durante la noche. Los roboat podrían navegar a través de los canales, ubicarse y sujetarse a plataformas que sostienen contenedores de basura y transportarlos de regreso a las instalaciones de recolección.
“En Ámsterdam, los canales se usaban para el transporte y otras cosas para las que ahora se usan las carreteras. Pero las carreteras cerca de los canales ahora están muy congestionadas, y tienen ruido y contaminación, por lo que la ciudad desea agregar más funcionalidad a los canales”, dice Luis Mateos, principal autor de la investigación e Investigador en el MIT Senseable City Lab. “Las tecnologías de conducción autónoma pueden ahorrar tiempo, costes y energía, y mejorar la ciudad en el futuro”.
La coautora Daniela Rus, directora del Laboratorio de Ciencias de la Computación e Inteligencia Artificial (CSAIL), agregó: “El nuevo mecanismo de cierre es muy importante para crear estructuras emergentes. Roboat no necesita el enganche para el transporte autónomo en el agua, pero lo necesita para crear cualquier estructura, ya sea móvil o fija”.
¿Cómo funciona la conexión?
Cada roboat está equipado con un mecanismo de acoplamiento, con componentes de bola y cavidad, en la parte frontal, posterior y laterales. El componente de bola se asemeja a un volante de bádminton: un cuerpo de goma en forma de cono con una bola de metal en el extremo. El componente del zócalo es un embudo ancho que guía la bola hacia un receptor. Dentro del embudo, un rayo láser actúa como un sistema de seguridad que detecta cuando la bola cruza el receptor. Eso activa un mecanismo con tres brazos que se cierran y capturan la bola, al tiempo que envían una señal de retroalimentación a ambos roboats de que la conexión está completa.
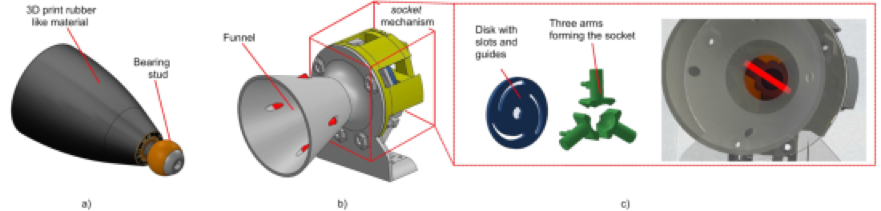
a) Macho pasivo. b) Zócalo (hembra). c) Elementos del zócalo.
Cada roboat tiene un sistema de sensores LIDAR y una cámara, por lo que pueden moverse de manera autónoma de un punto a otro a través de los canales. Cada estación de acoplamiento, generalmente un roboat inmóvil, tiene una hoja de papel impresa con una etiqueta de realidad aumentada, llamada AprilTag, similar a un código QR simplificado. Comúnmente utilizado para aplicaciones robóticas, el AprilTag permite a los robots detectar y calcular su posición y orientación 3D precisa con respecto a la etiqueta.
Tanto el AprilTag como las cámaras están ubicadas en el centro de los roboats. Cuando un roboat se encuentra aproximadamente a uno o dos metros de distancia del AprilTag, el roboat calcula su posición y orientación a la etiqueta. Esto produce un plano 2D fácil de calcular que mide la distancia del roboat, con la distancia a la izquierda y derecha de la etiqueta. Usando esa información, el roboat se dirige hacia la etiqueta y puede conectarse con precisión.
El embudo compensa cualquier desalineación en la inclinación del roboat. Sin embargo, si el roboat va más allá de la distancia calculada y no recibe una señal de realimentación del rayo láser, sabe que ha fallado. “En aguas difíciles, a veces las unidades de roboat no son lo suficientemente fuertes como para superar las ráfagas de viento o las corrientes de agua pesada”, advierte Mateos. “Un componente lógico en el roboat dice: ‘Falló, así que haré una copia de seguridad, recalcularé la posición y volveré a intentarlo'”.
Futuras iteraciones
Los investigadores ahora están diseñando roboats aproximadamente cuatro veces más grandes que los actuales, por lo que serán más estables en el agua. Mateos también está trabajando en una actualización del embudo que incluye pinzas de goma similares a tentáculos que se aprietan alrededor del componente, como un calamar que captura a su presa.
También desarrollan un sistema que muestra los AprilTags en un monitor LCD que cambia los códigos para que varias unidades roboat se ensamblen en un orden determinado. Al principio, a todos los roboat se les dará un código para que se mantengan exactamente a un metro de distancia. Después, el código cambia para dirigir el primer roboat al acoplamiento. Seguidamente, la pantalla cambia los códigos para enganchar el siguiente roboat y así sucesivamente.
Darwin Caldwell, director de investigación de Robótica Avanzada en el Instituto Italiano de Tecnología, visualiza aún más aplicaciones posibles para la capacidad de enganche autónomo, como “el reabastecimiento de aviones en pleno vuelo, el acoplamiento espacial y el manejo de contenedores de carga”.









0 comentarios :
Publicar un comentario